
UAV haptic control using Novint Falcon - pt 2
I consider the second and final part of the falcon project as finished from 1PPM perspective. Most of the project I already described in the previous post
Short summary of achieved results:
- All the work done and test for Px4 SITL(jmavsim)
- Mavros is used to talk to pixhawk (or SITL in this case)
- Falcon is not suitable for flying real models (it isn’t reliable enough)
Without further due, here is the video showing the proof of concept in action:
Want to know more about the project? Read on!
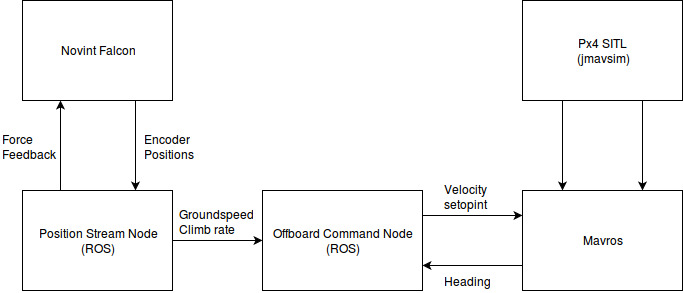
Architecture
All of the work was done using ROS. The diagram below shows main relations between modules.
I had a bit of an issue with making Novint Falcon work with ROS, here are some troubleshooting tips:
- Check if your falcon is connected to power supply (I lost 5 minutes of my life on that once!)
- Remember that there is this issue
- You need C++14 compiler to make libnifalcon work with ROS, make sure you adjust your CMakeLists.txt file
mavros
Mavros worked out rather well for me, however there are some things to look out for:
- Px4 needs to be in offboard mode for mavros velocity setpoints to be accepted
- Requests to mavros have to be sent with rate of at least 2Hz
- Messages sent to need a valid timestamp
- Mavros expects velocity setpoints to be in earth referenced, so there is a need for converting from body frame
Testing
Unfortunately I won’t be able to test this solution with a real multirotor any time soon. The huge disadvantage that comes with novint falcon is lack of portability (it needs 30V 1A power supply). Also I still don’t have my pixhawk.
The reason I don’t recommend using falcon for real aircraft is that I found it a bit unreliable. Sometimes it seems as if force feedback stops working for a short period of time. If you want to use it with a real aircraft then make sure that you have some safety mode that you can fall back to.
Future work
I consider the project finished as a proof of concept. I might commit something more here and there to the github repo but I’m not planning to keep the project fully maintained.
- Implement yaw rotation using digital buttons (lame, I know)
- Implement homing mode on starting program (for offsetting Novint Falcon encoders)
- Programatically establish minimum and maximum values for positions received from Falcon for each axis
- Clean up the code
- Review offb_node.cpp timings (especially refresh rates)
Here you can find the repo with all the code I created. Feel free to fork, and do pull requests!