In my previous post I was sharing my first impressions from using ArduSimple RTK GPS. It’s time to share some information about the small but steady progress I had made since!
In my previous post I was sharing my first impressions from using ArduSimple RTK GPS. It’s time to share some information about the small but steady progress I had made since!

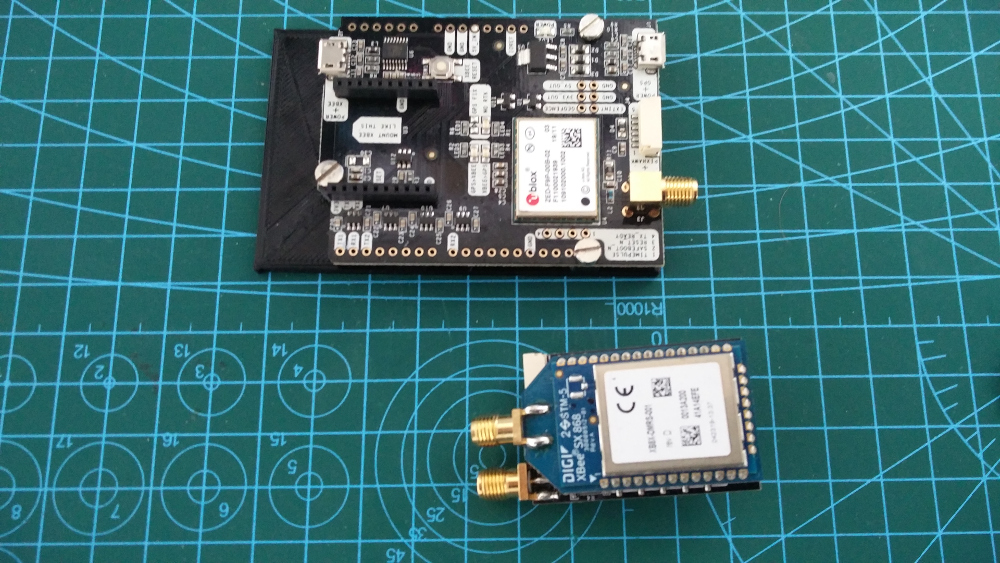
ArduSimple provided me with their RTK2B+heading module recently. In this blog post I’m describing my experience running the first tests with these modules and my planned further tests. My end goal is to integrate the modules with ROS and get a precise positioning in 2D with extra heading information.
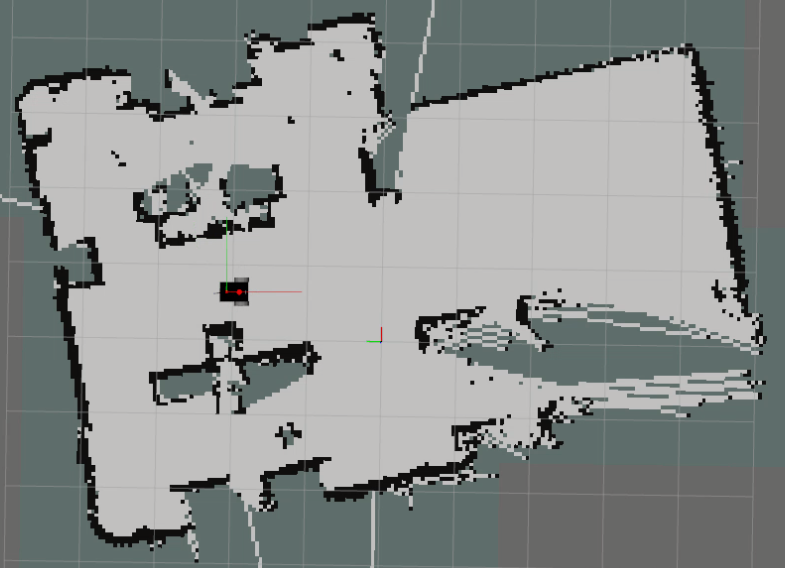
If I knew how to draw I would create a header for this blog post that would show a lama getting vaccinated. Since you won’t be seeing it any time soon, let’s jump into iris_LaMa, a localization and mapping library that works with ROS.
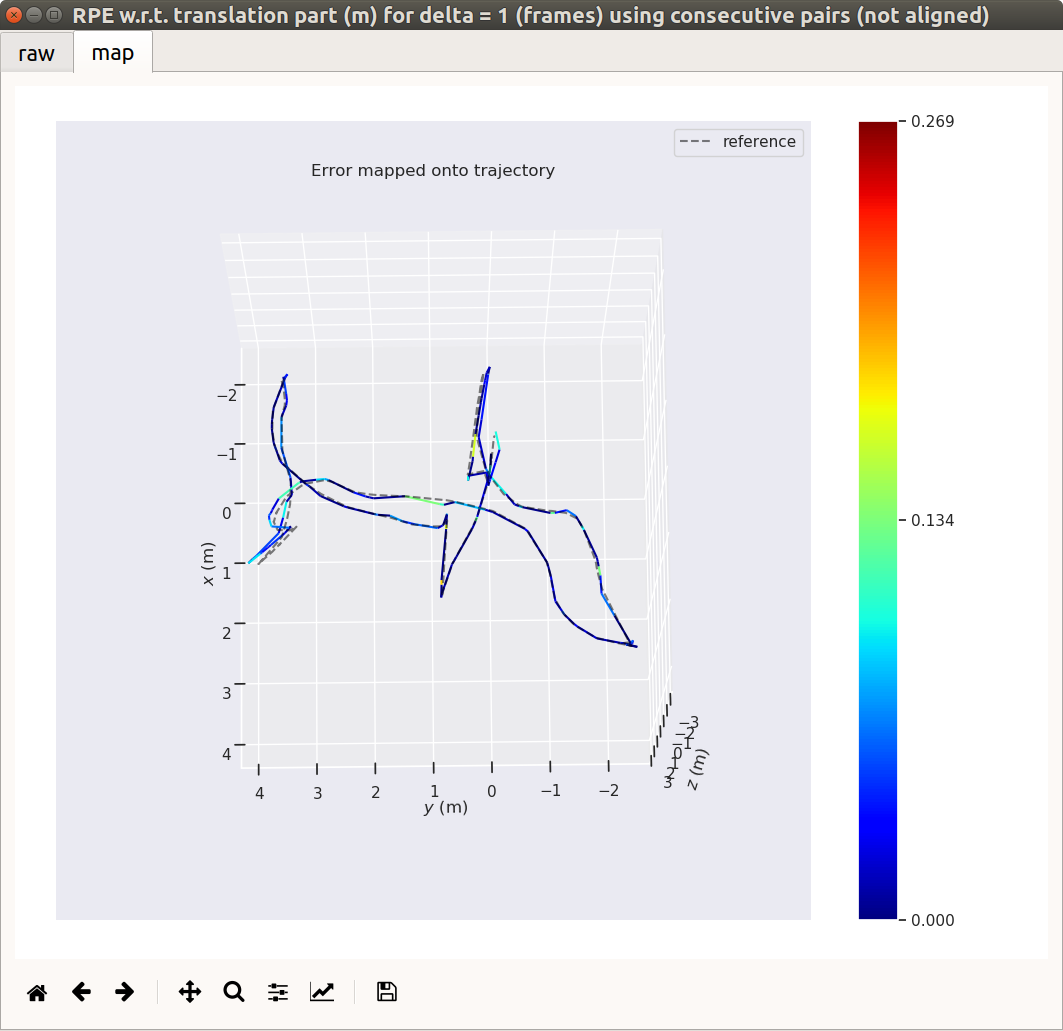
While working on another blog post I fell into a rabbit hole of comparing SLAM packages using ROS. This blog post briefly describes how I managed to compare the results of two SLAM packages by using evo Python package.
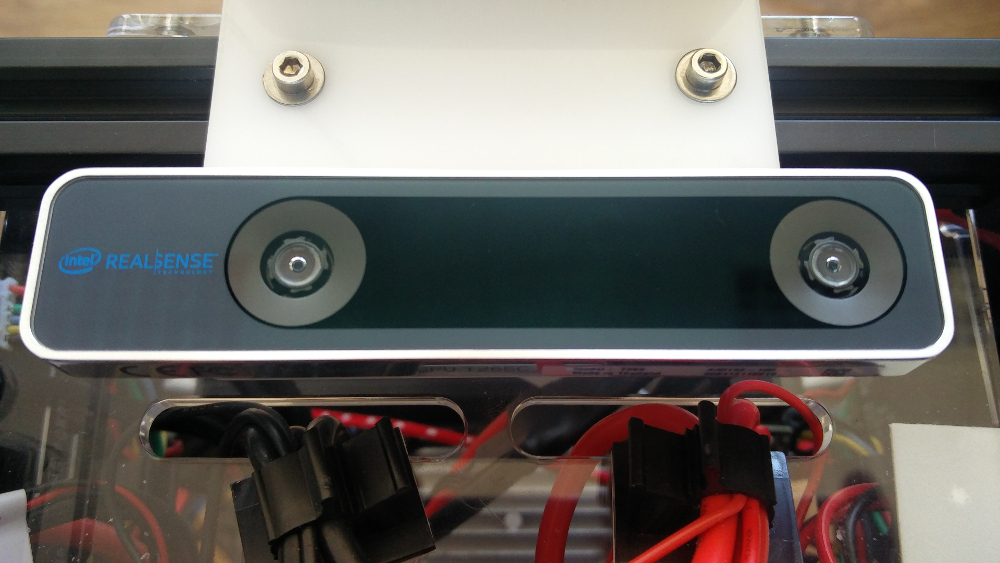
In this post I will write about my first impressions after working with Realsense T265 on a wheeled mobile robot and give some tips on the configuration I think is most correct with respect to ROS standards.

In the past couple of weeks, as part of a project with Robosynthesis, I’ve been exploring slam_toolbox by Steven Macenski. This post summarizes my experience so far.
In the final tutorial of this 3 part web tutorial we will be looking at using a web video server for streaming of camera feed over HTTP.