In this intermediate tutorial we will look into using libuvc_camera package with a simple USB camera. In the process we will learn something about udev rules and nodelets.
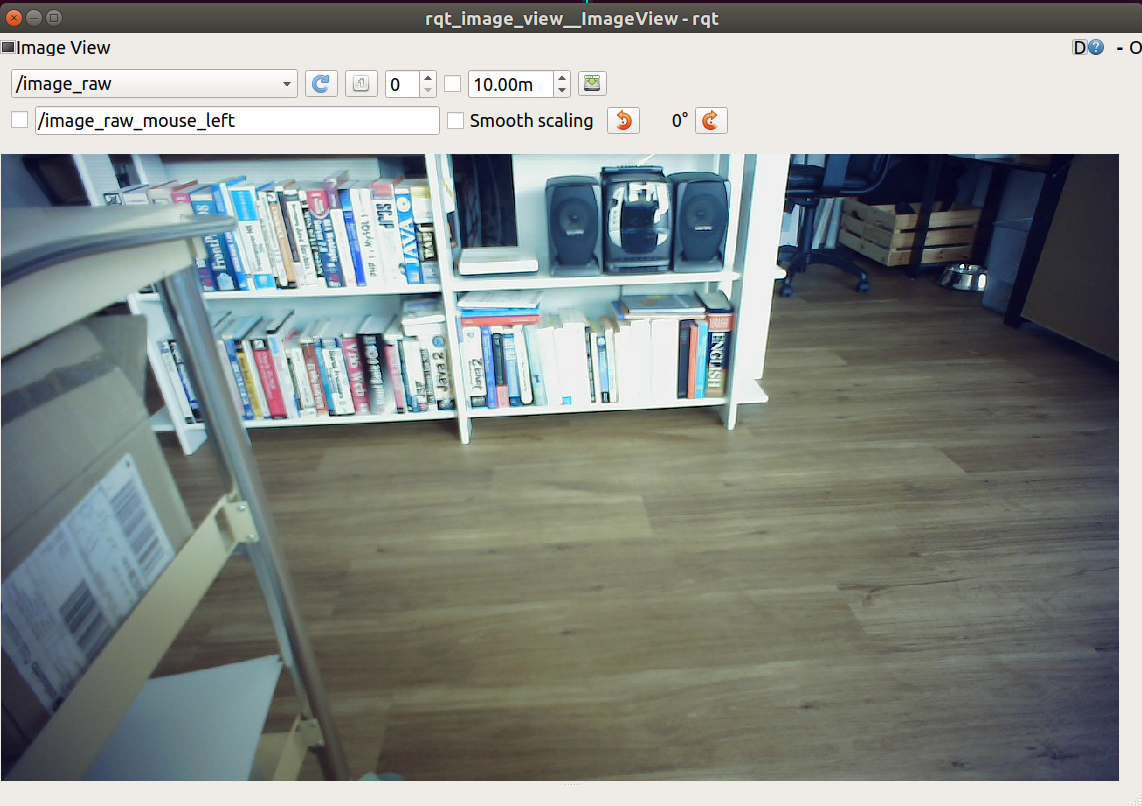
In this intermediate tutorial we will look into using libuvc_camera package with a simple USB camera. In the process we will learn something about udev rules and nodelets.
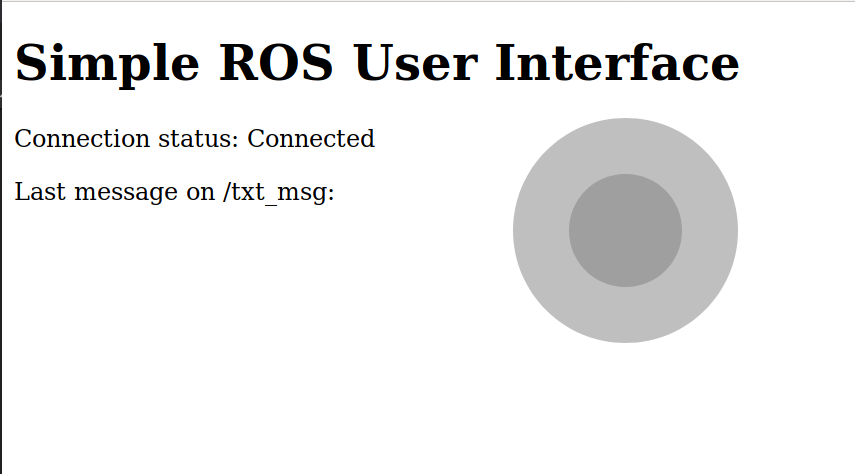
In this beginners tutorial I’ll give you a step by step introduction how to use rosbridge server and roslibjs to communicate with ROS using your web browser. By the end of this tutorial we will have a working prototype of a simple website allowing you to control a robot using a virtual joystick.

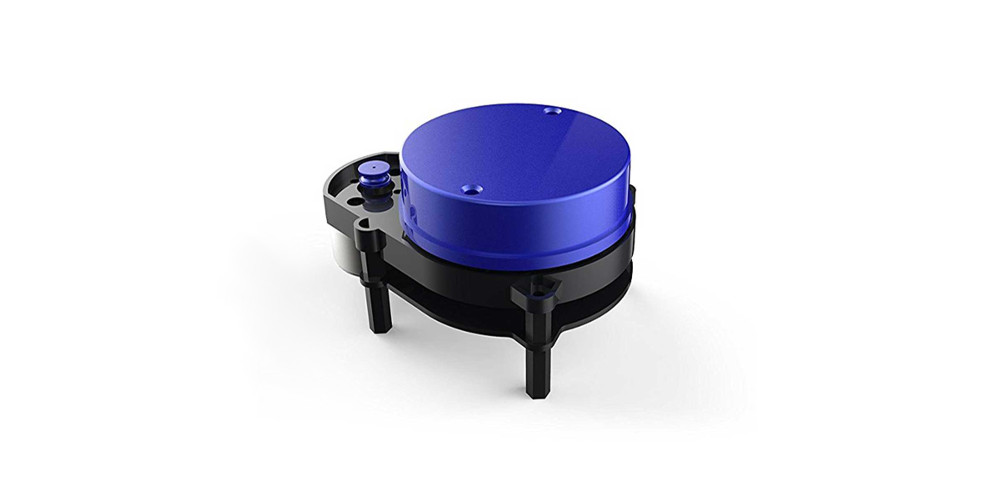
This month I received a sample X2 LiDAR from YDLIDAR. In this blog post I’m documenting my experience using it and using it for SLAM using ROS and Google Cartographer.

It has been one year since I decided to go solo and start working as a Robotics consultant/contractor. In this post I’ll sum up my experience so far.

Continuing on my excursion in LiDAR testing I gave a Livox Mid-40 a spin. This post sums up my experience working with it for couple of days.
Recently I gave YDLIDAR X4 a spin, in this post I’m documenting my experience using it together with EAIBOT ydlidar ROS package.
Inspired how Patagonia does business I decided to join 1% For The Planet, pledging to donate at least 1% of sales to environmental non-profit organizations.